Partially Observabily Reinforcement Learning#
In this guide, we will train a CfC network to solve a partially observable Markov decision process (POMDP). In particular, we consider a partially observable version of the HalfCheetah Mujoco environment. Moreover, we will also evalute the trained policy when the observation is corrupted by noise to test the robustness of the learned policy. This tutorial serves as a beginner’s guide to using CfC networks in reinforcement learning, showing how to define a custom CfC network and how to use it with rllib, as well as demonstrating the the advantages of RNNs in partially observable environments.
Code is provided for TensorFlow and relies on ray[rllib] for it’s proximal policy optimization (PPO) implementation and gymnasium[mujoco] for the HalfCheetah environment.
Setup and Requirements#
Before we start, we need to install some packages
pip3 install ncps tensorflow "ray[rllib]" "gymnasium[mujoco]"
Partially Observable HalfCheetah#
First, we need to create a partially observable version of the HalfCheetah environment.
We do this by wrapping the original environment in a gymnasium.ObservationWrapper
import gymnasium
from gymnasium import spaces
import ray
from ray.tune.registry import register_env
from ray.rllib.models import ModelCatalog
from ray.rllib.algorithms.ppo import PPO
import time
import numpy as np
from ray.rllib.models.modelv2 import ModelV2
from ray.rllib.models.tf.recurrent_net import RecurrentNetwork
from ray.rllib.utils.annotations import override
import tensorflow as tf
import ncps.tf
import matplotlib.pyplot as plt
class PartialObservation(gymnasium.ObservationWrapper):
def __init__(self, env: gymnasium.Env, obs_indices: list):
gymnasium.ObservationWrapper.__init__(self, env)
obsspace = env.observation_space
self.obs_indices = obs_indices
self.observation_space = spaces.Box(
low=np.array([obsspace.low[i] for i in obs_indices]),
high=np.array([obsspace.high[i] for i in obs_indices]),
dtype=np.float32,
)
self._env = env
def observation(self, observation):
filter_observation = self._filter_observation(observation)
return filter_observation
def _filter_observation(self, observation):
observation = np.array([observation[i] for i in self.obs_indices])
return observation
Concretely, we will remove all joint velcities from the observation space.
def make_partial_observation_cheetah():
return PartialObservation(
gymnasium.make("HalfCheetah-v4"), [0, 1, 2, 3, 8, 9, 10, 11, 12]
)
CfC Policy Network#
Next, we will subclass ray.rllib.models.tf.recurrent_net.RecurrentNetwork to define our CfC policy network.
The network comprises of two dense layers followed by a CfC layer.
class CustomRNN(RecurrentNetwork):
"""Example of using the Keras functional API to define a RNN model."""
def __init__(
self,
obs_space,
action_space,
num_outputs,
model_config,
name,
cell_size=64,
):
super(CustomRNN, self).__init__(
obs_space, action_space, num_outputs, model_config, name
)
self.cell_size = cell_size
# Define input layers
input_layer = tf.keras.layers.Input(
shape=(None, obs_space.shape[0]),
name="inputs",
)
state_in_h = tf.keras.layers.Input(shape=(cell_size,), name="h")
seq_in = tf.keras.layers.Input(shape=(), name="seq_in", dtype=tf.int32)
# Preprocess observation with a hidden layer and send to RNN
self.preprocess_layers = tf.keras.models.Sequential(
[
tf.keras.Input((obs_space.shape[0],)), # batch dimension is implicit
tf.keras.layers.Dense(256, activation="silu"),
tf.keras.layers.Dense(256, activation="silu"),
]
)
self.td_preprocess = tf.keras.layers.TimeDistributed(self.preprocess_layers)
dense1 = self.td_preprocess(input_layer)
rnn_out, state_h = ncps.tf.CfC(
cell_size, return_sequences=True, return_state=True, name="rnn"
)(
inputs=dense1,
mask=tf.sequence_mask(seq_in),
initial_state=[state_in_h],
)
logits = tf.keras.layers.Dense(
self.num_outputs, activation=None, name="logits"
)(rnn_out)
values = tf.keras.layers.Dense(1, activation=None, name="values")(rnn_out)
# Create the RNN model
self.rnn_model = tf.keras.Model(
inputs=[input_layer, seq_in, state_in_h],
outputs=[logits, values, state_h],
)
self.rnn_model.summary()
@override(RecurrentNetwork)
def forward_rnn(self, inputs, state, seq_lens):
model_out, self._value_out, h = self.rnn_model([inputs, seq_lens] + state)
return model_out, [h]
@override(ModelV2)
def get_initial_state(self):
return [
np.zeros(self.cell_size, np.float32),
]
@override(ModelV2)
def value_function(self):
return tf.reshape(self._value_out, [-1])
Evaluate Function#
Next, we will define a function that evaluates the performance of a policy network with optional noise injected to the observations.
Note
Depending on the rllib version and installation the apply_filter may be already included in the compute_single_action function.
def run_closed_loop(
algo, rnn_cell_size, n_episodes=10, pertubation_level=0.0, apply_filter=True
):
env = make_partial_observation_cheetah()
init_state = None
state = None
if rnn_cell_size is not None:
state = init_state = [np.zeros(rnn_cell_size, np.float32)]
obs, info = env.reset()
ep = 0
ep_rewards = []
reward = 0
while ep < n_episodes:
if pertubation_level > 0.0:
obs = obs + np.random.default_rng().normal(0, pertubation_level, obs.shape)
if apply_filter:
filter = algo.workers.local_worker().filters.get("default_policy")
obs = filter(obs, update=False)
if rnn_cell_size is None:
action = algo.compute_single_action(
obs, explore=False, policy_id="default_policy"
)
else:
action, state, _ = algo.compute_single_action(
obs, state=state, explore=False, policy_id="default_policy"
)
obs, r, terminated, truncated, info = env.step(action)
reward += r
if terminated or truncated:
ep += 1
obs, info = env.reset()
state = init_state
ep_rewards.append(reward)
reward = 0
return np.mean(ep_rewards)
Training Code#
Finally, we will define a function that trains a policy network. To compare the performance of the CfC policy network with a baseline, we will make the function such that it can train a CfC policy network or an MLP baseline policy network.
def run_algo(model_name, num_iters):
config = {
"env": "my_env",
"gamma": 0.99,
"num_gpus": 1,
"num_workers": 16,
"num_envs_per_worker": 4,
"lambda": 0.95,
"kl_coeff": 1.0,
"num_sgd_iter": 64,
"lr": 0.0005,
"vf_loss_coeff": 0.5,
"clip_param": 0.1,
"sgd_minibatch_size": 4096,
"train_batch_size": 65536,
"grad_clip": 0.5,
"batch_mode": "truncate_episodes",
"observation_filter": "MeanStdFilter",
"framework": "tf",
}
rnn_cell_size = None
if model_name == "cfc_rnn":
rnn_cell_size = 64
config["model"] = {
"vf_share_layers": True,
"custom_model": "cfc_rnn",
"custom_model_config": {
"cell_size": rnn_cell_size,
},
}
elif model_name == "default":
pass
else:
raise ValueError(f"Unknown model type {model_name}")
algo = PPO(config=config)
history = {"reward": [], "reward_noise": [], "iteration": []}
for iteration in range(1, num_iters + 1):
algo.train()
if iteration % 10 == 0 or iteration == 1:
history["iteration"].append(iteration)
history["reward"].append(run_closed_loop(algo, rnn_cell_size))
history["reward_noise"].append(
run_closed_loop(algo, rnn_cell_size, pertubation_level=0.1)
)
print(
f"{model_name} iteration {iteration}: {history['reward'][-1]:0.2f}, with noise: {history['reward_noise'][-1]:0.2f}"
)
return history
Note
Exact learning curves and performance numbers will vary between runs.
Once we have defined everything we can compare the two network architectures.
if __name__ == "__main__":
ModelCatalog.register_custom_model("cfc_rnn", CustomRNN)
register_env("my_env", lambda env_config: make_partial_observation_cheetah())
ray.init(num_cpus=24, num_gpus=1)
cfc_result = run_algo("cfc_rnn", 1000)
ray.shutdown()
ModelCatalog.register_custom_model("cfc_rnn", CustomRNN)
register_env("my_env", lambda env_config: make_partial_observation_cheetah())
ray.init(num_cpus=24, num_gpus=1)
mlp_result = run_algo("default", 1000)
fig, ax = plt.subplots(figsize=(10, 6))
ax.plot(
mlp_result["iteration"], mlp_result["reward"], label="MLP", color="tab:orange"
)
ax.plot(
cfc_result["iteration"], cfc_result["reward"], label="CfC", color="tab:blue"
)
ax.plot(
mlp_result["iteration"],
mlp_result["reward_noise"],
label="MLP (noise)",
color="tab:orange",
ls="--",
)
ax.plot(
cfc_result["iteration"],
cfc_result["reward_noise"],
label="CfC (noise)",
color="tab:blue",
ls="--",
)
ax.legend(loc="upper left")
fig.tight_layout()
plt.savefig("cfc_vs_mlp.png")
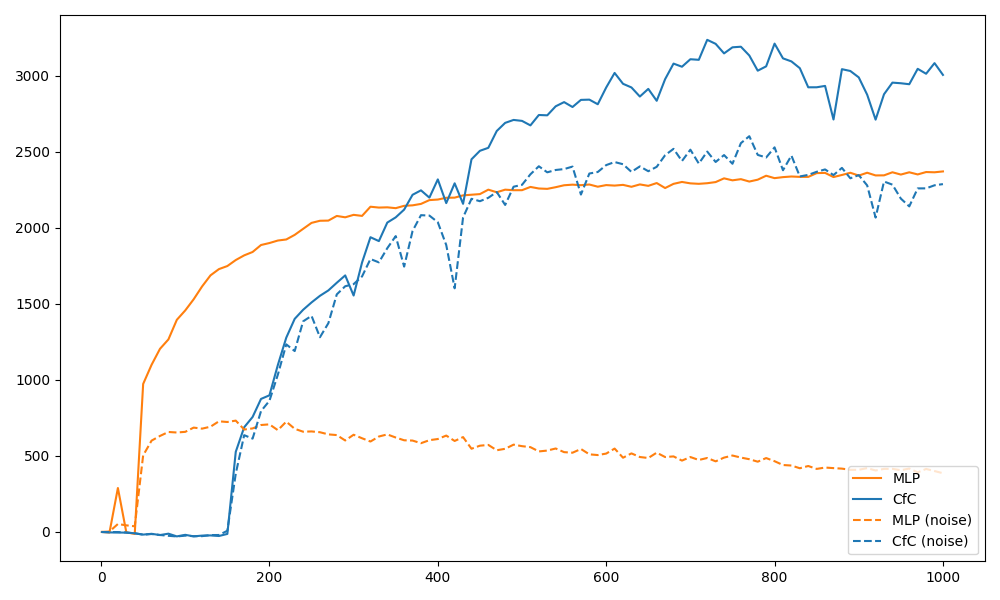
As we have see in the plot above, although the MLP baseline policy network experiences a faster initial improvement, the CfC policy network eventually outperforms the MLP baseline policy network, while also being more robust to noise.